| Chapter 3: Robotic Arm Design |
| Iris.4 Mobile Robot Manual |
by Robert T. Arrigo
The Mind Project, Illinois State University
Iris.4 has two arms: the Gripper Arm, which is used for manipulating objects, and the Drawer Arm, which is used for writing. Soon you will build Iris's Gripper Arm, but first you should know a few things about robotic arms and their design.
Overview
Iris's arms are built on 5" tall stands mounted on either side of the robot's top platter; the stands allows the arms to pivot from side to side. Because a servo controls this motion, the arms are limited to moving 90 degrees in either direction. The rest of each arm is a combination of servos (the joints of the arm), links (the bones of the arm), and wires, which run from the servos to the Servo Controller (and function as the nerve cells of the arm). The servo motors are mounted onto the links and these link/servo pairs are strung together to make a multi-jointed arm. The Gripper Arm has 5 servo joints (plus one servo to open and close the hand). The Drawer Arm has 4 servo joints.
Dexterous Arms
Achieving a high degree of dexterity when building robotic arms using this link-servo method is very difficult. Servos are generally weak motors, yet they must support the weight of whatever portion of the arm extends off of them. To increase the lifespan of a servo motor, and to ensure its load is not too heavy to rotate, only a limited number of servos and links can be assembled together. However, the less servos an arm has, the less dexterity the arm has, and thus the more difficulty the robot has when trying to pick up objects at hard-to-get-at angles. The Gripper Arm was designed to provide maximum dexterity in the horizontal plane, but at the expense of minimal vertical dexterity. Only one of the Gripper Arm's five joints provides vertical motion to the arm, but this design is sufficient for tasks that involve lifting objects up and setting them down (as opposed to more complex motions).
The Arm Builder Station
The Arm Builder Station is setup on a special table in the lab. When you are at the Arm Builder Station, servos and links can be dragged from the toolbox and snapped into place to build an arm of your choosing.
Screenshot of Arm Builder Station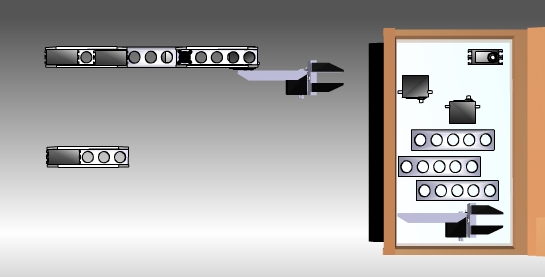
You should return to the lab and build a copy of the Gripper Arm that you find at the Arm Builder Station.